19일. 텔레리안이 엔비디아 젯슨 AGX 토르를 탑재한 AI 로보틱스 플랫폼 ‘AVS300’과 저지연 센서 통합 플랫폼 개발 완료 소식을 알린 날이다. 로봇의 '눈'과 '두뇌' 사이의 병목 현상을 해결하기 위해 초고속 데이터 고속도로를 뚫어준 것과 같다. 그런데 지금 개발자 커뮤니티에서 진짜 뜨거운 건 단순한 제품 출시가 아니라, 공식 데브킷이 해결해주지 못한 '가려운 곳'을 정확히 긁어줬다는 점이다.
현장 실무자들은 늘 고민한다. GPU 연산 성능은 갈수록 괴물처럼 변하는데, 정작 그 연산 장치로 데이터를 밀어 넣어주는 센서 인터페이스는 여전히 구시대적이라는 불만이 많았다. 특히 카메라 여러 대를 달고 3D 매핑이나 라이다 융합을 하려면 타임스탬프 하나 맞추는 데만 며칠을 쏟아부어야 하는 게 현실이다. '연산력은 충분한데 데이터가 꼬여서 AI가 헛발질한다'는 탄식이 여기저기서 터져 나왔다.
이런 상황에서 텔레리안이 내놓은 AVS300의 'GMSL2 8채널' 지원과 '하드웨어 수준의 정밀 동기화'는 실무자들에게 꽤나 충격적인 디테일로 다가온다. 단순히 칩셋을 박아 넣은 보드가 아니라, 실제 로봇이 굴러가는 현장에서 어떤 데이터 꼬임이 발생하는지 정확히 이해하고 설계했다는 인상을 주기 때문이다. 이제 논쟁의 중심은 '얼마나 빠른 GPU를 쓰느냐'에서 '얼마나 깨끗하고 정확한 데이터를 지연 없이 밀어 넣느냐'로 옮겨가고 있다.
19일 공개된 AVS300, 젯슨 토르와 GMSL2 8채널의 결합
공식 데브킷(Dev Kit, 개발자용 키트)을 사용해 본 엔지니어라면 인터페이스의 물리적 제약 때문에 설계 단계부터 난관에 부딪혔던 경험이 많을 것이다. 19일 정식 출시된 AVS300은 바로 이 지점, 즉 하드웨어 확장성의 갈증을 정면으로 겨냥하며 등장했다. 이 컨트롤러는 엔비디아 젯슨 AGX 토르(Jetson AGX Thor, 고성능 AI 엣지 컴퓨팅 모듈)를 탑재하고도 공식 키트가 지원하지 않는 GMSL2(Gigabit Multimedia Serial Link 2, 고속 카메라 인터페이스) 8채널을 구현했다. 덕분에 개발자는 별도의 복잡한 변환 장치나 외부 브릿지를 거치지 않고 최대 8대의 카메라를 컨트롤러에 직접 연결해 고해상도 영상을 실시간으로 수집할 수 있다.
지금 커뮤니티에서 가장 뜨거운 논쟁은 단순한 연산 성능 수치가 아니라 데이터를 얼마나 지연 없이, 그리고 정확하게 밀어넣느냐 하는 파이프라인의 효율성이다. 특히 스테레오 비전이나 3D 매핑, 라이다-카메라 센서 융합 같은 고난도 자율주행 알고리즘을 구현할 때 카메라 대수가 늘어나면 케이블링의 복잡도와 데이터 동기화 문제는 개발자에게 지옥 같은 스트레스로 다가온다. AVS300이 GMSL2 8채널을 직접 지원한다는 것은 단순한 포트 확장이 아니라 데이터 경로의 근본적인 단순화를 의미한다. 센서 입력 경로가 분산되면서 발생하는 물리적 지연을 최소화하고 타임스탬프 관리의 복잡도를 획기적으로 낮출 수 있다는 점에서 실무자들의 반응이 빠르게 달아오르고 있다.
더욱이 이 고성능 엣지 AI 컨트롤러가 국내에서 직접 개발되고 제조되었다는 사실은 공급망 관리와 하드웨어 최적화 측면에서 상당한 무게감을 가진다. 그동안 해외 솔루션의 인터페이스 제약에 맞춰 소프트웨어를 억지로 수정하거나 값비싼 커스텀 보드를 따로 제작해 붙여야 했던 번거로움을 국내 제조 솔루션으로 해결한 셈이다. 젯슨 토르라는 강력한 AI 두뇌에 8채널 GMSL2라는 최적의 신경망을 결합함으로써 하드웨어 레벨에서 데이터 병목 현상을 완전히 제거했다. 이는 산업용 AI나 무인 플랫폼처럼 가혹한 환경에서 극도의 실시간성과 신뢰성이 동시에 요구되는 프로젝트를 수행하는 개발자들에게 매우 강력하고 실질적인 무기가 될 것으로 보인다.
FPGA와 QSFP28 광링크가 만드는 '단일 파이프라인' 구조
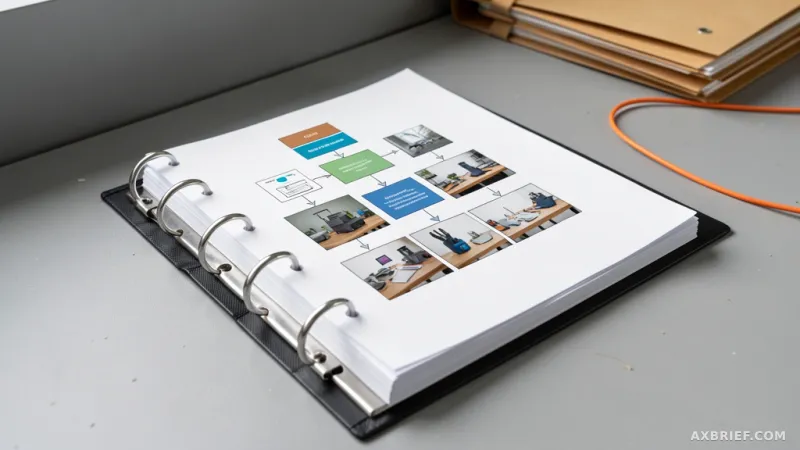
기존 로봇 시스템은 카메라, 라이다, IMU 등 다양한 센서가 각기 다른 인터페이스와 케이블로 엉켜 있는 구조였다. 센서마다 입력 경로가 분산되다 보니 데이터 동기화나 타임스탬프 관리가 까다롭고, 배선이 복잡해 유지보수 단계에서 개발자의 고충이 컸다. 텔레리안은 이 지점을 정면으로 돌파해 모든 이종 센서 데이터를 하나의 길로 모으는 단일 파이프라인 구조를 구현했다. 개발자 커뮤니티에서 지금 이 설계가 뜨거운 이유는 단순히 연결 방식을 바꾼 것이 아니라 데이터가 흐르는 물리적 경로 자체를 재정의했기 때문이다.
이 구조의 최전방에는 FPGA(Field Programmable Gate Array, 프로그래밍 가능 반도체) 기반의 센서 수집부가 배치된다. FPGA가 현장에서 쏟아지는 서로 다른 규격의 센서 데이터를 하드웨어 수준에서 일차적으로 수집하고 정렬하는 역할을 수행한다. 이렇게 정제된 데이터는 QSFP28(Quad Small Form-factor Pluggable 28, 고속 광트랜시버) 기반의 고속 광링크 경로를 통해 전송된다. 4x25GbE라는 압도적인 대역폭을 활용하는 이 광경로는 방대한 양의 센서 데이터를 지연 없이 AI 연산부로 밀어 넣는다. 하드웨어 레벨에서 전송 효율을 극대화해 소프트웨어 계층의 오버헤드를 걷어낸 점이 기술적인 핵심이다.
여기에 엔비디아 홀로스캔 센서 브릿지(NVIDIA Holoscan Sensor Bridge, HSB) 기술을 적용해 센서 수집부와 AI 연산부를 물리적으로 완전히 분리했다. 센서 수집부는 데이터가 발생하는 거친 현장 최전선에 배치하고, 고가의 AI 연산부는 외부 충격이나 환경 영향이 적은 보호 구역에 따로 두는 방식이다. 이러한 물리적 분리는 장거리 전송이 필요한 환경에서 특히 강력한 힘을 발휘한다. 특히 전기적 절연이 필수적이거나 EMI(Electromagnetic Interference, 전자파 간섭) 영향이 심한 군수, 방산, 산업용 무인 플랫폼 환경에서 시스템 안정성을 비약적으로 높이는 결과로 이어진다.
이러한 단일 파이프라인 구조는 센서의 종류가 늘어나도 시스템 복잡도가 선형적으로 증가하지 않는 구조적 이점을 제공한다. 이종 센서 데이터를 하나의 고속 광경로로 통합함으로써 배선을 획기적으로 단순화하고 데이터 전송의 예측 가능성을 확보했다. 현장 엔지니어들은 센서부와 연산부의 물리적 격리가 가져오는 유지보수의 편의성과 시스템 신뢰도 향상에 대해 매우 긍정적인 반응을 보이고 있다. 이는 단순한 부품의 조합이 아니라 엣지 AI 시스템이 실제 산업 현장의 가혹한 환경을 견디기 위해 선택한 최적의 아키텍처라는 평가가 지배적이다.
'케이블 지옥'과 '타임스탬프 꼬임'을 해결한 설계 차이
기존 로봇 시스템을 구축할 때 개발자가 가장 먼저 마주하는 건 카메라, 라이다(LiDAR, 빛을 이용한 거리 측정 센서), IMU(Inertial Measurement Unit, 관성 측정 장치)가 제각각 다른 인터페이스와 케이블로 얽혀 있는 광경이다. 센서마다 입력 경로가 분산되어 있다 보니 케이블링 단계부터 복잡도가 치솟고, 유지보수 과정에서 어떤 선이 어디로 연결되었는지 확인하는 작업에만 상당한 시간이 소요된다. AVS300은 여기서 GMSL2(Gigabit Multimedia Serial Link 2, 고속 영상 전송 인터페이스) 8채널 인터페이스를 구현해 이 문제를 정면으로 돌파했다. 특히 공식 Thor Dev Kit(토르 개발자 키트)이 지원하지 않는 영역을 하드웨어 수준에서 직접 구현했다는 점이 개발자들 사이에서 뜨거운 반응을 얻고 있다. 최대 8대의 카메라를 직접 연결할 수 있는 구조는 배선 단순화를 넘어 시스템 전체의 물리적 안정성을 확보하는 결과로 이어진다.
물리적인 선 정리보다 개발자를 더 괴롭히는 건 데이터가 들어오는 시점이 서로 어긋나는 타임스탬프 꼬임 현상이다. 서로 다른 센서에서 들어오는 데이터의 시간을 소프트웨어적으로 맞추려 하면 필연적으로 미세한 오차가 발생하며, 이는 스테레오 비전이나 3D 매핑 같은 고난도 자율주행 알고리즘에서 치명적인 인식 오류를 야기한다. AVS300은 이를 해결하기 위해 프레임 동기 펄스(Frame Sync)와 PPS(Pulse-Per-Second, 초당 1회 펄스) 기반의 하드웨어 정밀 동기화 체계를 구축했다. 소프트웨어 층위에서 시간을 계산하는 것이 아니라, 하드웨어 수준에서 정밀한 펄스를 보내 모든 센서가 동일한 시점에 데이터를 수집하도록 강제하는 방식이다. 센서 융합 과정에서 발생하는 시간차를 원천적으로 제거함으로써 데이터 품질을 비약적으로 높였다.
여기에 PTP(Precision Time Protocol, 정밀 시간 프로토콜) 기반의 시간 기준을 적용해 정밀도를 한 단계 더 끌어올렸다. 토르(Thor)의 시스템 클럭을 GPS, IMU, 라이다 등 외부 센서와 하드웨어 수준에서 통합함으로써 전체 시스템이 하나의 단일한 시간 축을 공유하게 만들었다. 개발자 커뮤니티에서는 그동안 각 센서의 타임스탬프를 수동으로 보정하며 겪었던 고충을 떠올리며 이번 통합 설계의 실효성에 주목하고 있다. 특히 여러 대의 로봇이 정밀하게 협력해야 하는 다중 차량 자율 협력 주행 환경에서는 1ms의 오차가 충돌이나 경로 이탈로 이어질 수 있다. 하드웨어 수준의 통합 클럭은 이러한 불확실성을 제거해 AI 모델이 오직 인식과 판단에만 집중할 수 있는 깨끗한 데이터셋 수집 환경을 제공한다.
3D 매핑부터 군수·방산까지, '데이터 품질'이 바꾸는 현장
현장에서 개발자들이 가장 골머리를 앓는 지점은 GPU의 연산 속도가 아니라 센서 간의 미세한 시간차다. 스테레오 비전(Stereo Vision, 두 개의 카메라로 거리감을 측정하는 기술)이나 3D 매핑, 라이다(LiDAR, 빛을 이용한 거리 측정 센서)와 카메라의 센서 융합 알고리즘을 최적화할 때, 밀리초 단위의 오차는 곧바로 인식 오류로 이어진다. 정밀한 시간 정렬이 이루어지지 않으면 로봇이 인식하는 물체의 위치가 실제와 어긋나며, 이는 자율주행 알고리즘의 신뢰도를 떨어뜨리는 결정적인 요인이 된다. 하드웨어 수준에서 PPS(Pulse-Per-Second, 초당 1회 펄스) 기반의 정밀 동기화를 구현함으로써 데이터 품질을 확보했다는 점이 이번 플랫폼이 주는 실질적인 이득이다. 개발자들 사이에서는 이제 단순한 칩셋 성능 경쟁보다 데이터를 얼마나 깨끗하게 정렬해 AI 모델에 밀어 넣어주느냐가 성능의 상한선을 결정한다는 논의가 뜨겁다.
물리적인 배선 구조의 변화는 산업 현장의 운용성을 완전히 바꾼다. 기존 로봇 시스템은 수많은 센서 케이블이 엉켜 유지보수가 힘들고 전자파 간섭(EMI, Electromagnetic Interference)에 취약해 예기치 못한 시스템 다운이 잦았다. 하지만 엔비디아 홀로스캔 센서 브릿지(NVIDIA Holoscan Sensor Bridge, 저지연 센서 통합 기술)를 통해 센서 수집부와 AI 연산부를 물리적으로 분리하고 고속 광링크를 통해 데이터를 전송하는 구조를 채택하면서 장거리 전송과 배선 단순화가 가능해졌다. 전기적 절연을 통해 노이즈를 차단하고 EMI 영향을 저감한 설계는 전자기적 간섭이 심한 공장이나 극한의 환경에서도 시스템이 안정적으로 작동하게 만든다. 이는 단순히 케이블을 정리하는 수준을 넘어 하드웨어의 생존성과 직결되는 문제이며 러기드 엣지 AI(Rugged Edge AI, 극한 환경용 엣지 AI) 시스템으로 가기 위한 필수 관문이다.
이러한 데이터 품질의 향상은 AMR(Autonomous Mobile Robot, 자율 이동 로봇)과 AGV(Automated Guided Vehicle, 무인 운반차)의 실시간 제어 정밀도를 높인다. 스마트팩토리의 고속 산업 시각 검사나 군수 및 방산용 무인 플랫폼처럼 한 치의 오차도 허용되지 않는 환경에서 정밀한 시간 동기화는 생존과 직결된 핵심 요건이다. 특히 여러 대의 로봇이 함께 움직이는 멀티 로봇 및 다중 차량 자율 협력 주행 환경에서는 각 기기가 공유하는 시간 기준이 하드웨어 수준에서 일치해야만 충돌 없이 효율적인 협업이 가능하다. 고성능 AI 칩셋의 연산력을 100% 활용하기 위해서는 데이터를 정제하고 정렬하는 파이프라인의 품질이 뒷받침되어야 하며, 이것이 자율주행의 완성도를 결정짓는 마지막 퍼즐 조각이 된다.
K-엣지 AI의 승부수, 'TFLOPS'보다 중요한 '데이터 파이프라인'
개발자들이 벤치마크 시트에서 가장 먼저 확인하는 수치는 TFLOPS(테라플롭스, 1초당 1조 번의 부동소수점 연산 횟수)다. 하지만 실제 거친 현장에 로봇을 투입하면 이야기가 달라진다. 연산 성능이 아무리 높아도 센서 데이터가 제때 도착하지 않거나 시간 축이 어긋나면 AI 모델은 무용지물이 된다. 지금 개발자 커뮤니티에서는 단순한 칩셋 성능 경쟁보다 데이터를 어떻게 효율적으로 긁어모아 전달하느냐는 파이프라인 설계 능력이 진짜 실력이라는 논의가 뜨겁다. 고성능 GPU를 달았는데 정작 데이터 입력 단계에서 병목이 생겨 성능을 다 쓰지 못하는 상황이 빈번하기 때문이다.
텔레리안은 현재 러기드 엣지 AI(Rugged Edge AI, 극한 환경용 AI) 시스템으로 영역을 넓히기 위한 필드 테스트를 진행하고 있다. 단순히 카메라 영상만 처리하는 수준을 넘어 라이다(LiDAR, 빛을 이용한 거리 측정 센서), 레이더(Radar, 전파를 이용한 거리 측정 센서), IMU(관성 측정 장치), 오디오까지 아우르는 이종 센서 통합 영역으로 확장하는 계획이다. 산업 현장이나 군수, 방산 분야에서는 온도 변화가 극심하거나 진동이 심한 환경이 많다. 이런 곳에서 데이터 유실 없이 정밀하게 정보를 수집하는 능력은 단순한 소프트웨어 최적화를 넘어 하드웨어 설계 역량과 직결되는 문제다.
김석규 대표는 로봇과 자율주행 시스템의 성능이 AI 연산 성능만으로 결정되지 않는다고 강조한다. 다양한 센서 데이터를 정확한 시간 기준으로 수집하고 지연 없이 AI 연산부까지 전달하는 구조가 현장형 AI 시스템의 핵심이라는 분석이다. 이는 연산 장치라는 두뇌만큼이나 신경계에 해당하는 데이터 전송 경로가 중요하다는 뜻이다. 특히 외산 솔루션이 놓치기 쉬운 한국 특유의 정밀 제조 및 방산 환경에 최적화된 러기드 시스템을 구축함으로써 국산 솔루션의 실무 경쟁력을 입증하려는 전략이 읽힌다.
실제 현장 엔지니어들 사이에서는 하드웨어와 소프트웨어가 따로 노는 상황에 대한 피로감이 매우 높다. 센서마다 인터페이스가 다르고 타임스탬프가 어긋나면 AI 모델을 아무리 정교하게 튜닝해도 실제 구동 성능 향상에는 한계가 오기 때문이다. 이번에 시도되는 저지연 센서 통합 플랫폼은 이러한 데이터 병목 현상을 근본적으로 해결해 산업용 AI와 무인 플랫폼의 신뢰도를 높이는 데 집중한다. 단순한 부품 조립을 넘어 데이터의 흐름을 완전히 제어하는 최적화 단계까지 국산화했다는 점이 실무자들 사이에서 높게 평가받는 지점이다.